MineAction
Manufacturer of fiber optic cable for submarines
SEDI-ATI offers disposable ultra-lightweight and compact fiber optic cables directly mounted onto tethered underwater robots for inspection and combat missions.

Majorconstraints
The solution has to:
- Be immersed in water and thus needs to be hermetic,
- Have a neutral buoyancy in order not to sink nor rise,
- Be resistant to sea salt corrosion,
- Withstand deep water pressure,
- Have a broad bandwidth to allow both video and monitoring signals,
- Have a very low radius of curvature compatible with shipwreck diving expeditions for instance,
Thechallenge
How to guide an unmanned submarine vehicle when radio frequency waves (RF) cannot penetrate deeply through water and can potentially accidentally trigger a mine?
Our seas are infested with mines
Today, our worldwide seas would still be infested with some 300 000 remnant mines dropped during World War II. This is without mentioning the ones dropped during more recent conflicts. These bombs can still be active despite decades spent in seawater. They are real underwater threats that can damage, sink or completely destroy ships. That is why being able to detect and neutralize them is a major stake when navigating on potentially mined areas.
ROVs are guided by an umbilical cable
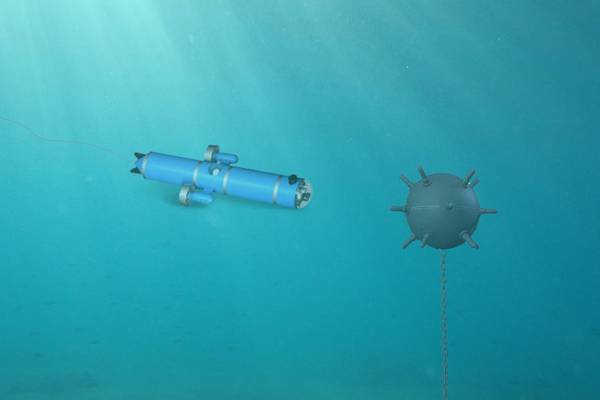
ROVs are tethered via an umbilical cable from the support vessel or unmanned surface vehicle (USV) which deploys them. This link allows the operator onboard a ship at a safe distance from the threat to remotely control and guide the ROV. The umbilical can transmit data in real-time in both directions (top-down orders and bottom-up measurements) in order to operate in the best conditions. Therefore, the ROV can safely approach the mine and eventually place an explosive charge near the mine to destroy it.
Most of USVs are equipped with an unwinding system stored on a winch to drag several hundred meters of umbilical cable with a large diameter of around 15 mm. It requires a significant energy source to power the system. It also implies the addition of a costly rotating joint (revolving joint/rotary seal/slip ring). Besides, the drag of the umbilical cable in strong currents has a high impact on the hydrodynamic behavior of the ROV. This “traditional” solution results in a cumbersome, heavy, costly, and inefficient cable.
ROVs are the new mine hunters
With the development of unmanned underwater remotely operated vehicles (ROVs), it is now possible to perform mine-hunting and mine-neutralization without exposing humans to danger. Indeed, the whole operation is supervised by an operator located onboard a ship far from the danger zone or on land.
The mine-action crew sends naval robots in the minefield from specialist vessels or from land. These seagoing robots can be either autonomous underwater vehicles (AUV) or unmanned surface vehicles (USV). They are remotely guided by a radio link from the ship or from land. Their first mission is to detect and classify mines. In order to identify and neutralize mines, these robots, especially USVs, deploy other robots that are remotely operated vehicles (ROV) for inspection and combat missions.
The supremacy of disposable fiber-optic links over traditional umbilical cables
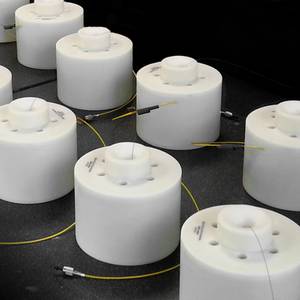
To overcome these problems, SEDI-ATI has designed a range of disposable and lightweight fiber optic spools for tethered vehicles. The spool also called “tape”, is directly mounted onto the ROV. Hence, it is the ROV that deploys the optical cable, and no more the USV. Therefore, there is no traction nor any other mechanical force applied to the optical fiber. As a result, we can propose fiber optic spools at lower costs, in smallest versions, and more efficient in depths and in currents than “traditional” umbilical cables.
SEDI-ATI fiber optic spools for tethered vehicles are composed of a very compact and light package in which is included a precision wound untwisted 250 µm optical fiber allowing long-distance deployment up to 20 km. The fiber can be reinforced with a 350 µm coating for optimum resistance allowing higher speed payout. The deployable side of the spool is equipped with a connector to be connected to the control station on the USV, and the opposite fiber end is pigtailed with a 1.8 mm standard jacket to be connected to an hermetic feedthrough on the ROV. And of course, we can design tapes with different optical fiber lengths, depending on the mission.
Another significant advantage of our solution is that the optical cable can be dumped into the sea, allowing to shorten the minefield clearance missions since there is no more need to rewind the cable.
SEDI-ATIsolution
A disposable ultra-lightweight and compact fiber optic cable directly mounted onto the robot with a hermetically sealed interface.
Advantagesof the SEDI-ATI solution
- Low cost,
- Lightweight and compact solution,
- One fiber optic spool means one single mission,
- The fiber optic spool is directly integrated onto the robot,
- Ease of installation on the robot in “tape” style,
- No traction nor any other mechanical force applied on the optical fiber during the deployment of the cable,
- Reliable and efficient solution in depths and currents,
- The complete system operates under balanced pressure,
- The fiber optic cable is deployable over long distances in the range of 10 to 20 km,
- The fiber optic cable can be dumped into the sea.
Related products
-
Disposable fiber-optic spool for Unmanned Underwater Vehicles [UUV-ROV]
The innovative concept of our disposable fiber optic spool for ROV lies in the fact that it is directly mounted onto the unmanned underwater drone.